

Siamo uno dei fornitori FA one-stop più professionali in Cina. I nostri prodotti principali includono servomotori, riduttori epicicloidali, inverter e PLC, HMI. Marchi tra cui Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron e altri. Tempi di spedizione: entro 3-5 giorni lavorativi dal ricevimento del pagamento. Metodi di pagamento: Bonifico bancario, L/C, PayPal, West Union, Alipay, WeChat e così via.
| Articolo | Specifiche |
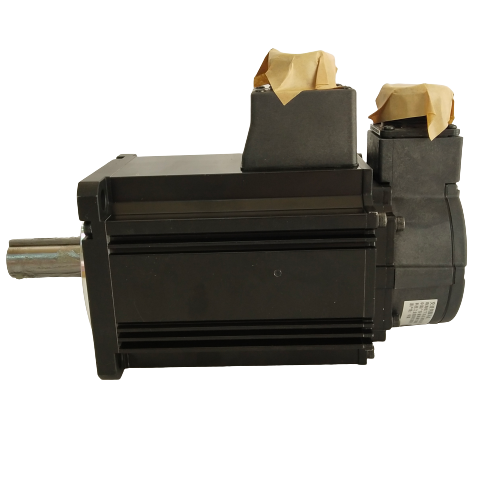
| Numero di parte | MSME302GCGM |
| Dettagli | Bassa inerzia, tipo connettore, IP65 |
| Cognome | MINAS A5 |
| Serie | Serie MSME |
| Tipo | Bassa inerzia |
| Prodotto su ordinazione speciale | Prodotto su ordinazione speciale |
| Avvertenze per prodotti su ordinazione speciale | Si prega di evitare che il motore o l'apparecchiatura contenente il motore venga distribuito in Giappone o in altre regioni del Giappone. |
| Classe di protezione | IP65 |
| Informazioni su Enclosure | Ad eccezione della parte rotante dell'albero di uscita e della parte del perno di collegamento del connettore del motore e del connettore dell'encoder. |
| Condizioni ambientali | Per maggiori dettagli, consultare il manuale di istruzioni. |
| Dimensione quadrata della flangia | 120 mm quadrati. |
| Dimensione quadrata della flangia (unità: mm) | 120 |
| Configurazione di uscita del motore | Connettore |
| Connettore encoder motore | Connettore |
| Capacità di alimentazione (kVA) | 4.5 |
| Specifiche di tensione | 200 Volt |
| Potenza nominale | 3000 W |
| Corrente nominale (A (rms)) | 18.1 |
| Freno di stazionamento | senza |
| Massa (kg) | 8.3 |
| Guarnizione dell'olio | con |
| Lancia | Chiavetta |
| Coppia nominale (N ⋅ m) | 9.55 |
| Coppia di picco massima momentanea (N ⋅ m) | 28.6 |
| Corrente massima (A (op)) | 77 |
| Frequenza del freno rigenerativo (volte/min) | Senza opzione: nessun limite Con opzione: Nessun limite Opzione (resistenza rigenerativa esterna) Codice articolo: DV0P4285 x 2 in parallelo |
| Informazioni sulla frequenza del freno rigenerativo | Fare riferimento ai dettagli di [Descrizione delle specifiche del motore], Nota: 1 e 2. |
| Velocità di rotazione nominale (giri/min) | 3000 |
| Velocità di rotazione nominale massima (giri/min) | 5000 |
| Momento di inerzia del rotore (x10-4kg ⋅ m²) | 6.50 |
| Rapporto di momento di inerzia consigliato del carico e del rotore | 15 volte o meno |
| Informazioni sul rapporto di momento di inerzia consigliato del carico e del rotore | Fare riferimento ai dettagli di [Descrizione delle specifiche del motore], Nota: 3. |
| Encoder rotativo: specifiche | Sistema incrementale a 20 bit |
| Encoder rotativo: Risoluzione | 1048576 |
Carico ammissibile
| Articolo | Specifiche |
| Durante il montaggio: Carico radiale direzione P (N) | 980 |
| Durante il montaggio: Carico di spinta in direzione A (N) | 588 |
| Durante il montaggio: Carico di spinta direzione B (N) | 686 |
| Durante il funzionamento: Carico radiale direzione P (N) | 490 |
| Durante il funzionamento: Carico di spinta in direzione A, B (N) | 196 |
| Informazioni sul carico ammissibile | Per maggiori dettagli, fare riferimento alla [Descrizione delle specifiche del motore] "Carico ammissibile sull'albero di uscita". |
Da 10 W a 7,5 kW, Alimentazione in ingresso per driver: Tensione CC 24 V/48 V・AC 100 V/200 V/400 V, incrementale a 20 bit・Encoder assoluto/incrementale a 17 bit, risposta in frequenza 2,3 kHz
Realizza movimenti rapidi e precisi. Risposta rapida e posizionamento ad alta precisione.
Nuovo algoritmo adottato“Controllo a due gradi di libertà”(2DOF) per migliorare la produttività e la precisione della lavorazione.
Nel modello convenzionale, poiché non potremmo regolare separatamente il controllo feedforward e i controlli di feedback, in altre parole anche se regolassimo solo“Approccio”di feedforward, aveva connessione con“Stabilizzazione”del controllo di feedback, era necessario un adattamento reciproco.










